Commutation Qualcom

La commutation des différents modules doit se faire suivant
un ordre bien précis, il aurait été possible de la
réaliser par des composants discrets (circuits RC) mais comme dans
la plupart des cas dans une station Hyper il est intéressant d'avoir
un système de balise pour entamer une liaison 'envoyer un locator
ou un indicatif en télégraphie), un pic à été
utilisé.
Autre problème, le relais que j'ai utilisé est un 28v
bi-stable et en portable seul du 12v est disponible.Une solution simple
de charge/décharge de condensateur par commutation de relais a été
retenue.
|
1 Le schéma

2 Le circuit
|
Implantation (ne pas oublier le strap)

|
Typon

|
3 Le programme Pic16f84
Le pic gère les temporisations et génère des messages
en télégraphie, la sortie 'Keyer' est reliée à
l'entrée manip de l'ic202. La tension sur cette entrée change
suivant si l'ic202 en en mode 'Cw' ou phonie... le pic détecte cette
tension et manipule cette entrée avec des messages pré-enregistrés.
La sélection des messages s'effectue via le bouton poussoir 'Sélect
message" tout en restant en réception.
La pin 'Ptt' de l'interface est reliée à une mise à
la masse extérieure venant du poste.
Les deux pins 'Recopie" relais correspondent aux contacts auxiliaires
du relais coaxial, le pic vérifie si le relais a vraiment collé
dans une position ou une autre. Le commun sur le relais est relié
à la masse.
La pin 'Commut ampli' est reliée à la carte d'alimentation
de l'ampli 1W Qualcomm (mise à la masse en Tx)
Les pins ''Commut Transverter + Fi' commutent le transverter et la
carte Fi en Tx
Les deux Dels indiquent le passage en Tx/Rx.
3.1 Personnalisation des messages
Les messages sont stockés dans la eeprom du pic, il est possible
de les éditer directement dans le fichier hexa avec un éditeur
de texte ou dans le logiciel de programmation sans avoir à compiler
à nouveau de programme source. De ce fait il suffit d'éditer
la partie eeprom et reprogrammer celle-ci en suivant.
La syntaxe est la suivante, identique au programme de balise de Victor
F1BIU :
-
S = Porteuse seule
-
A = Arrêt porteuse
-
P = pause
-
F = Fin, le message s'arrête, le pic attend le passage en mode phonie
(ic202)
-
R = Répétition du message. * L = tempo 1ere vitesse lente
exemple #255
-
V = tempo 2eme vitesse moyenne exemple #127
-
T = tempo 3eme vitesse rapide exemple #10
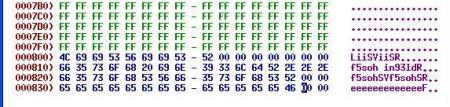
Exemples de messages dans la Eeprom, édités avec PonyProg
(version Linux/Win9x, fonctionne sur programmateur style JDM):
LiiSViiSR
Vitesse Lente, "ii", Porteuse Simple, Vitesse moyenne, [Image] etc...Répétition
Le "L" pour vitesse lente n'est pas indispensable, c'est la vitesse
par défaut des messages.......
Les quatre lignes bleues correspondent aux quatre messages, chaque message
doit se terminer par le caractère de contrôle, soit F ou R.
Dans le cas ou ces caractères de contrôle sont ommis sur une
ligne, le pic va continuer de lire dans la eeprom cela peut être
pratique dans le cas d'un message de plus de 16 caractères mais
lors de la sélection du message à envoyer le pic ne fonctionne
que ligne par ligne.
Les paramètres de timing sont à éditer dans le
source du programme si besoin :
Paramètres Timing messages Cw
mov duree_point,#1
mov duree_trait,#3
mov intervalle_traits_points,#1
mov intervalle_lettres,#3
mov intervalle_mots,#7
mov duree_pause,#20
mov duree_entre_cycles,#20
mov duree_porteuse_seule,#25
mov duree_arret_porteuse,#3
mov vite_1,#100
mov vite_2,#50
mov vite_3,#25
ret
4 Les fichiers
F5SOH - 29 avril 2002
 La commutation des différents modules doit se faire suivant
un ordre bien précis, il aurait été possible de la
réaliser par des composants discrets (circuits RC) mais comme dans
la plupart des cas dans une station Hyper il est intéressant d'avoir
un système de balise pour entamer une liaison 'envoyer un locator
ou un indicatif en télégraphie), un pic à été
utilisé.
La commutation des différents modules doit se faire suivant
un ordre bien précis, il aurait été possible de la
réaliser par des composants discrets (circuits RC) mais comme dans
la plupart des cas dans une station Hyper il est intéressant d'avoir
un système de balise pour entamer une liaison 'envoyer un locator
ou un indicatif en télégraphie), un pic à été
utilisé.